




















































随着人机协作型机器人的广泛应用, 通过人机物理交互进行机器人运动技能学习是人工智能与机器人学交叉领域的前沿重点研究方向,目的是利用人工智能技术从交互经验数据中获得机器人仿人操作技能,并泛化到新的相近任务或不同环境中,实现机器人的快速编程和高效适应,具有广阔的应用前景。然而,现有绝大部分的技能学习方法受限于交互数据的数量和维度、参数的学习效率等,仅适用于单步、简单的操作任务,缺乏考虑复杂长期操作任务的应用,存在效率低、适应性差等瓶颈问题。复杂长期操作任务是指机器人执行含有多个子目标,且各子目标间存在强时-空耦合的操作任务,具有步骤多、数据量大、数据维度高等特点,是机器人运动技能学习研究的重点与难点。
面向复杂长期操作任务的机器人运动技能学习技术方案
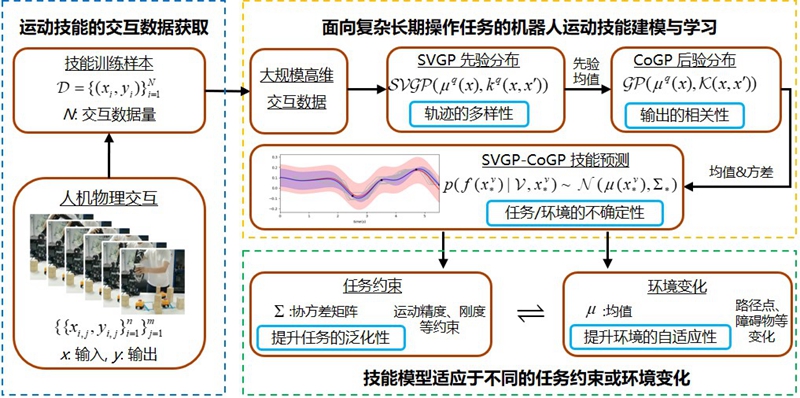
对此,广东省科学院智能制造所机器人技术团队提出了一种面向复杂长期操作任务的机器人运动技能高效学习方法。该方法引入稀疏高斯过程和变分推断进行运动技能的建模与学习,能够在任务精度保障下大幅度降低计算时间复杂度,提升学习效率,使机器人从大规模高维交互数据中进行运动技能学习成为可能。同时,提出了含有先验均值的多输出高斯过程对新情形的运动约束进行协同建模,实现相近任务或不同环境下给定起始、中间、目标路径点等约束时技能模型的精准调整和高效适应。该方法已在动态复杂环境下机器人执行多个急停按钮的按压任务中进行了理论验证,并在物流仓储等领域进行了应用测试,有效提升复杂长期操作任务下机器人的编程与部署效率。
相关成果已发表在国际权威期刊《IEEE Transactions on Automation Science and Engineering》,吴鸿敏博士为第一作者,广东省科学院智能制造研究所为第一单位。
论文信息: H. Wu, W. Yan, Z. Xu, T. Cheng, X. Zhou*. A Framework of Robot Skill Learning from Complex and Long-horizon Tasks. IEEE Transactions on Automation Science and Engineering, 2021 Nov 23; 1-11.


