




















































整体简介:
磁吸附爬壁机器人是将移动机构( 轮、履、足等) 与吸附机构( 磁铁、吸盘等)组合起来实现空间的全位置运行的一种特种作业机器人,可以将地面作业拓展到复杂空间,替代人工或轨道式作业机构进行高空作业,完成一些人工或轨道式作业机构难以完成的任务。对于具有较高的操作风险、工作环境差及人工依赖程度较高等特点的石化、核电/火电、造船、能源等高端装备制造业,可以采用爬壁机器人来代替人工完成清洗、焊接、检测以及喷涂等工作任务。
智能制造所已经研制出了WRobot-15、WRobot-25以及WRobot-35等面向不同工作任务的爬壁机器人系统,可以满足大型构件的各类型任务。爬壁机器人在国内属于新型产品,对于提高自动化水平、减轻对劳动力的依赖程度和提高生产效率具有重要作用。
系列1:面向焊接应用的WRobot-25型爬壁焊接机器人
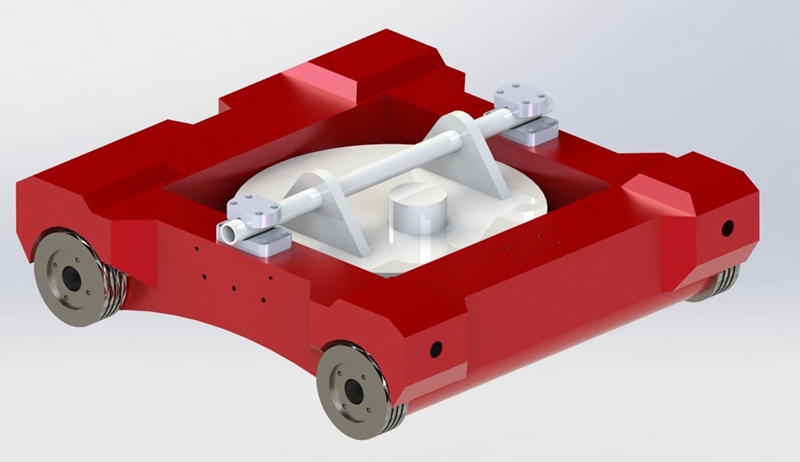
面向焊接应用的WRobot-25型爬壁焊接机器人是一种移动便捷,能够在船体上智能、自动地完成这类焊缝的焊接工作的焊接机器人,针对船体大多数为钢铁材料、船体焊缝长,焊接位置及其工艺的多样化,搭载先进的焊接系统和复合多传感焊缝跟踪系统,适应不同位置、立体曲面长焊缝焊接工作的特点,实现焊接系统工艺参数自适应调整、焊缝自跟踪、爬壁机器人移动自寻迹的协同控制,高质高效地完成多位置的立体曲线长焊缝的焊接工作。
面向焊接应用的WRobot-25型爬壁机器人,。
该型机器人广泛应用在船舶制造业中,能提高船舶制造的效率和质量,降低和控制成本,已经在广州新中国船厂及广船国际有限公司试用并取得良好的应用效果。
主要技术参数如下表所示:
| 功能及特点 | 技术参数 |
| 机器人本体尺寸 | 379×327×120mm(尺寸中等) |
| 重量 | 22.5 kg(自重中等) |
| 负载能力 | 50 kg(负载能力强) |
| 负重比 | 2.2(负重比大,一般产品小于2) |
| 单个磁轮吸附力 | 60 kg(可定制磁轮) |
| 运动控制器 | 脉冲控制器控制器(通讯稳定可靠) |
| 安全防护 | 过载保护、漏电保护、驱动器过热保护等(安全等级高) |
| 驱动方式 | 4台直流伺服步进电机+谐波减速器 |
| 供电 | 48/24V直流电源(能耗小) |
| 控制方式 | 线控,遥控曲面适应能力 D>0.12m(最小爬壁曲面小) |
| 防护等级 | IP65 |
| 爬壁角度 | 0-180°(可爬行立面、仰面) |
| 行走能力 | 0-5 m/min速度可调 |
| 越障能力 | 45mm宽、12mm突起或凹陷(越障能力强) |
系列2:面向板材加工成型的WRobot-15型爬壁焊接机器人

面向板材加工成型的WRobot-15型爬壁焊接机器人是一种能够在大型船舶等大型板材钢结构件壁面上稳定吸附,对焊缝进行跟踪实施应力消除的爬壁机器人,并通过其控制系统——板材热加工成形系统实现待加工板的自动化热加工成形和船体分段热矫形处理。整套设备操作简便,上手容易,可以显著提高热加工成形的加工生产效率,实现安全自动化生产。已经在中船黄埔文冲造船厂应用于大型板材的热处理加工成型中,取得了良好的应用效果。
主要技术参数如下表所示:
| 功能及特点 | 技术参数 |
| 机器人本体尺寸 | 285×240×100mm(尺寸小巧) |
| 重量 | 17.5kg(自重小) |
| 负载能力 | 40 kg(负载能力强) |
| 负重比 | 2.4(负重比大,一般产品小于2) |
| 单个磁轮吸附力 | 60-100kg(可定制磁轮) |
| 运动控制器 | 316E总线控制器(通讯稳定可靠) |
| 安全防护 | 过载保护、漏电保护、驱动器过热保护等(安全等级高) |
| 驱动方式 | 4台无框电机+谐波减速机(模块化设计,随意组合) |
| 供电 | 48/24V直流电源(能耗小) |
| 控制方式 | 线控,遥控,2.4G(控制方式多样) |
| 曲面适应能力 | D>0.12m(最小爬壁曲面小) |
| 防护等级 | IP65 |
| 爬壁角度 | 0-180°(可爬行立面、仰面) |
| 行走能力 | 0-20 m/min速度可调(速度快。稳定) |
| 越障能力 | 45mm宽、10 mm突起或凹陷(越障能力强) |
系列3:面向高压水除锈应用的WRobot-35型爬壁机器人
面向高压水除锈应用的WRobot-35型爬壁机器人,包括超高压水清洗器系统、真空回收废水废渣装置和爬壁机器人设备。利用超高压水清洗器除锈,并采用真空泵系统回收废水废渣的除锈方式,具有良好的环保效果,并且利用超高压水打击锈层除锈相对于人工喷砂方式,对船舶壁面的损伤程度要小。
主要技术参数如下表所示:
| 功能及特点 | 技术参数 |
| 机器人本体尺寸 | 505×428×150mm(外形尺寸较大) |
| 重量 | 37.5 kg(自重大) |
| 负载能力 | 80 kg(负载能力强) |
| 负重比 | 2.32(负重比大,一般产品小于2) |
| 单个磁轮吸附力 | 100kg(可定制磁轮吸附力至150 kg) |
| 安全防护 | 过载保护、漏电保护、驱动器过热保护等(安全等级高) |
| 驱动方式 | 4台无框电机+谐波减速机(模块化设计,随意组合) |
| 供电 | DC 48V |
| 曲面适应能力 | D>0.35m(最小爬壁曲面直径) |
| 防护等级 | IP65 |
| 爬壁角度 | 0-180°(可爬行立面、仰面) |
| 行走能力 | 0-20 m/min速度可调(速度快。稳定) |
| 越障能力 | 50mm宽、15 mm突起或凹陷(越障能力强) |
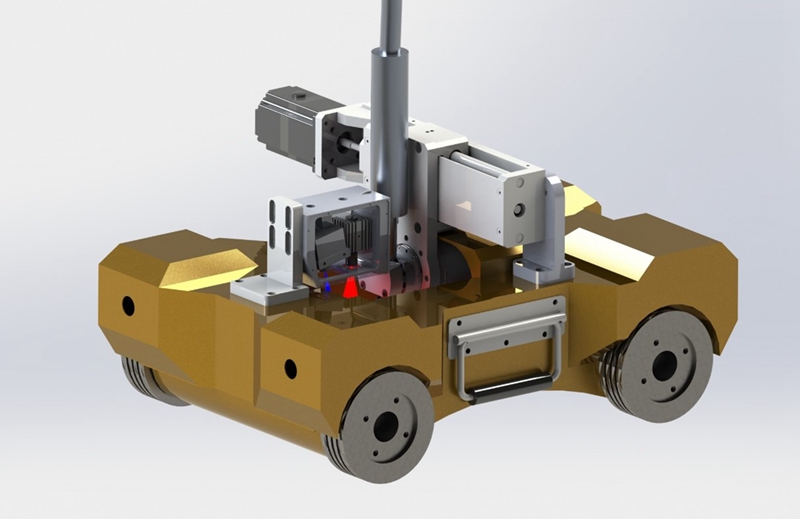
拓展应用:WRobot-15型爬壁协作机器人

在WRobot-15型爬壁机器人上面搭载UR3六轴机械手,通过更改末端的执行机构,实现在大型钢结构件上面的多任务协同工作。


