




















































在共享空间下,多移动机器人的轨迹跟踪与实时避障是多移动机器人协同控制的前沿与热点。由于多机共享空间的不确定性,潜在的人-机、机-机碰撞风险是多机器人控制的一大挑战。随着群体规模的不断增加,系统的通讯负载以及避碰决策空间也会指数增长,加之机器人本身移动能力的限制,给多机器人的轨迹跟踪与实时避障控制带来了巨大的挑战。
为此,省科学院智能制造所机器人团队提出基于安全优先的多层控制框架,可以实现群体非完全共享信息与移动能力受限情况下机器人群组的局部无碰撞运动规划与全局轨迹跟踪。基于约束优化思想建立距离阈值碰撞标准,构建了基于不等式的避碰规则,糅合避碰、轨迹追踪、速度界约束等多目标为一体进一步设计了安全优先的多层级多机控制框架,并结合递归神经网络(RNN, recurrent neural network)反馈思想和拉格朗日条件构造控制器,利用线性分段投影和KKT技术得到全局最优解。该方法通过仅协调各机器人的速度实现了当避碰标准不满足时,目标追踪机制在控制任务中为最高优先级,各机器人沿着期望轨迹运动。当避碰标准满足时,避碰机制则代替目标追踪机制在控制任务中占主导,保证优先避碰。该方法不需要机器人之间彼此通讯,避免了集中式控制对通讯性能要求过高的缺陷,对自动驾驶、车路协同系统等研究具有重要意义。
相关研究成果《Simultaneous Obstacle Avoidance and Target Tracking of Multiple Wheeled Mobile Robots with Certified Safety》发表在国际权威期刊《IEEE Transactions on Cybernetics》(JCR一区;IF= 11.049)。
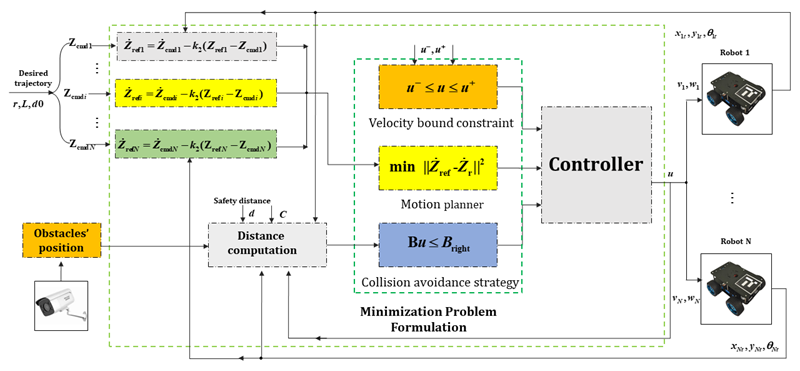
多移动机器人安全优先目标追踪方案实现框图


